Prinzip
Bei der Laserscannermessung mit einem LYNX Sensor wird der Laserstrahl durch einen rotierenden Spiegel kontinuierlich um 360° quer zur Fahrtrichtung abgelenkt.
Zusammen mit Vorwärtsbewegung des Messfahrzeugs wird ein Objektraum entlang des Fahrweges abgetastet. Die Entfernung zur Objektfläche wird über Laufzeitmessung ermittelt. Die Position und die Lage des Sensors im Raum, wird mit Hilfe von GPS (Global Positioning System) und INS (Inertiales Navigationssystem) bestimmt. Zusammen mit der Winkelmessung für den Spiegel lässt sich somit für jeden reflektierten Laserpuls die Position, d. h. Rechtswert, Hochwert und Höhe auf der Objektoberfläche, berechnen.
Erfassungsbereiche der Sensoren
Erfassungswinkel der Sensoren
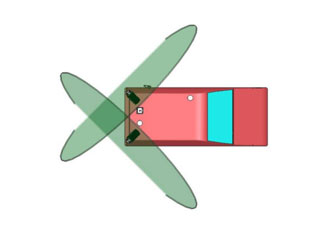
*S1, S2, S1+S2: Erfassungsbereiche der Scanner 1 und/oder 2